機器人柔性工作站
Robotic Flexible Workstation

並聯式協作機器人柔性裝配工作,結構設計緊湊、輕量化設計、占地面積小,實現工業自動化轉型,集成自動化機器人、控制系統、末端氣動夾爪工具與 3D 視覺感知系統模組化生產單元。結合靈活性與自動化技術的工作環境,快速換線能力、大幅縮短整體生產成本、高空間利用率、人機協作安全性,確保無碰撞安全且工作路徑最優化。
Delta Robot 並聯式機器手臂
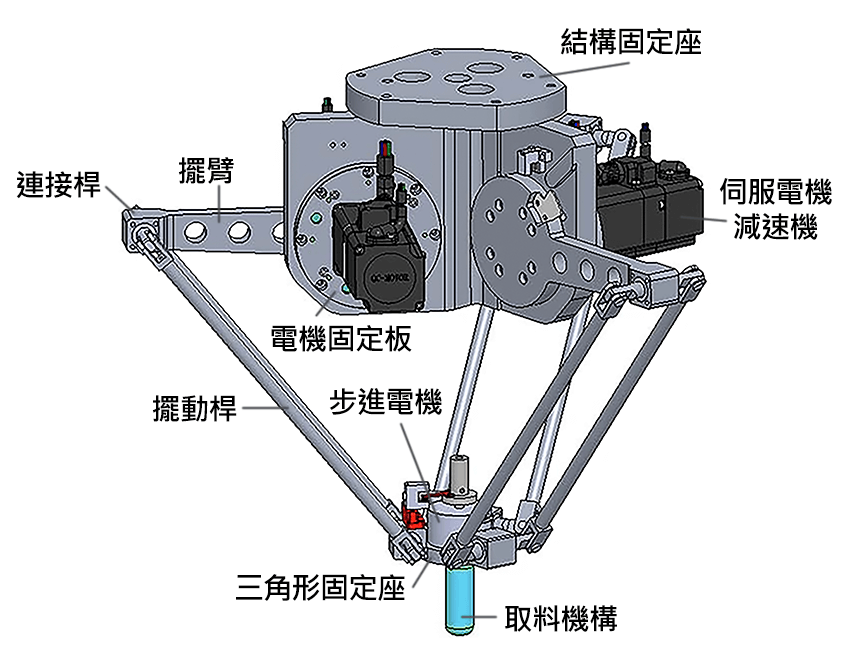
Delta Robot Parts 蜘蛛手主要部件
機械手臂結構固定座、伺服馬達、電機固定板、減速機、擺臂、連接桿、擺動桿、三角形固定座、步進馬達、氣動夾爪取料機構等組成。
柔性工作站基本參數
| 柔性工作站型號 | D400 | D600 |
|---|---|---|
| 最大抓取重量 | 0.2Kg | 0.5Kg |
| 最大工作半徑 | R 200mm | R 300mm |
| 單機工作站總重量 | 約 75Kg | 約 130Kg |
| 擺盤尺寸長 ╳ 寬 ╳ 高: | 240 ╳ 180 ╳ 10mm | 365 ╳ 260 ╳ 10mm |
| 柔性振動盤尺寸長 ╳ 寬 ╳ 高: | 220 ╳ 140 ╳ 145mm | 330 ╳ 230 ╳ 153mm |
| 作業供氣壓力 | 0.5 ~ 0.7Mpa | 0.5 ~ 0.7Mpa |
| 電源、功率 | AC220/50Hz、1KW | AC220/50Hz、1.5KW |
| 物料倉容量 | 1.5L (可根據實際需求訂製) | 2L (可根據實際需求訂製) |
| 生產效率 | 根據生產實物測試為准 | |
動作流程
上相機拍照後將資料傳輸取放料機構,三軸通過指令移動配合相機隨機取料,取料後移動至下相機拍照,對產品底部特徵姿態進行確認,確認後移動至放料位,完成一個週期的取放料動作。